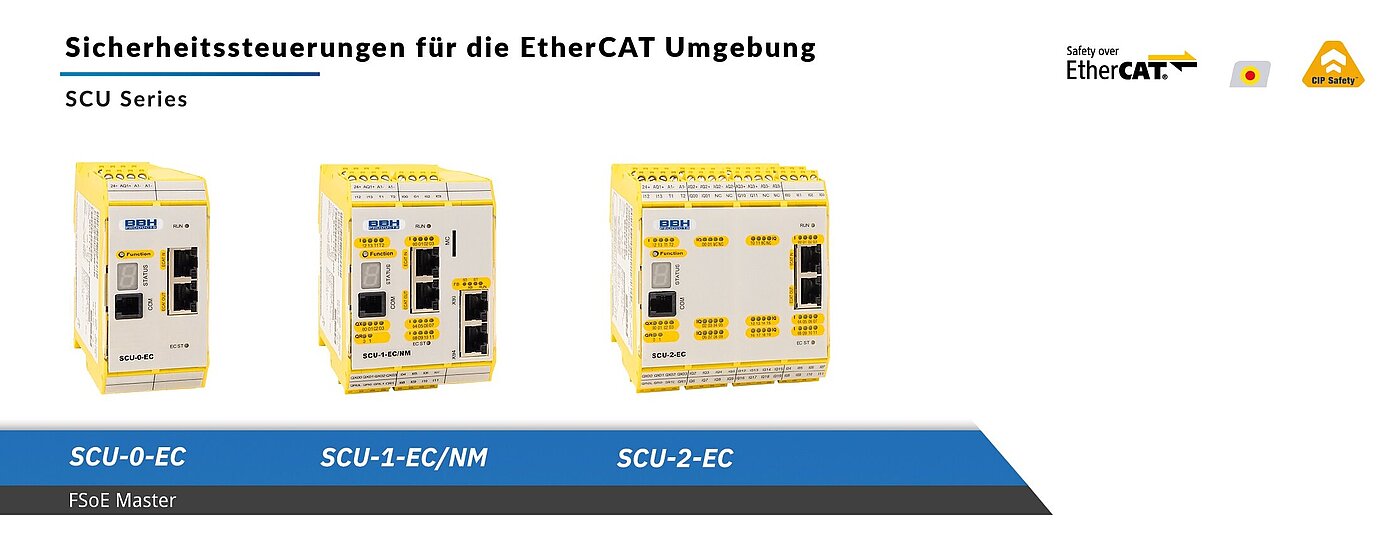
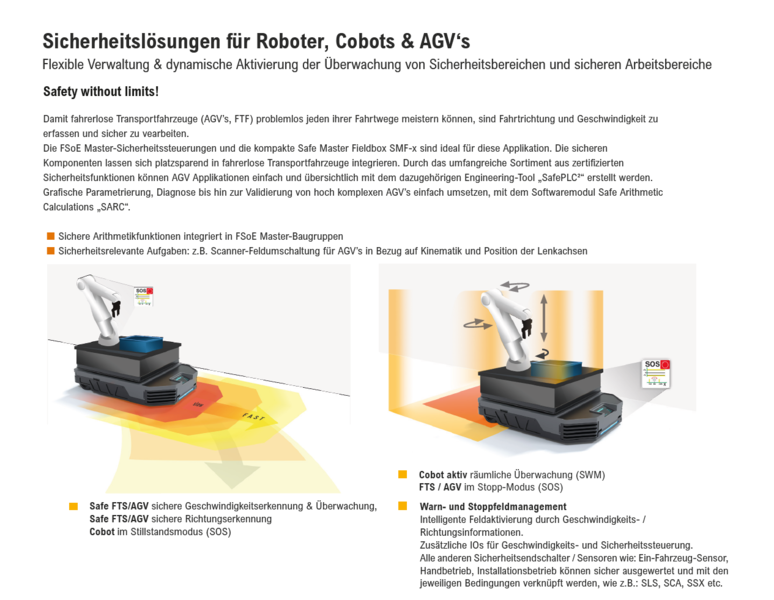
SAFE ARITHMETIC CALCULATION (SARC)
Mit der neuen SARC-Firmware-Erweiterung in der FSoE-Master-Serie SCU bieten wir eine komfortable Möglichkeit zur Lösung von komplexen sicherheitstechnischen Aufgabenstellung wie sie z.B. bei Safe Robotic oder AGV Sicherheitsfunktionen gefordert sind.
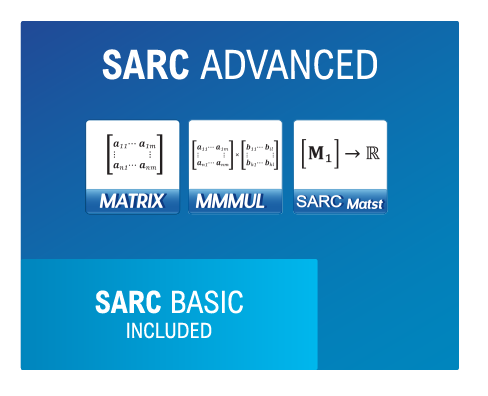
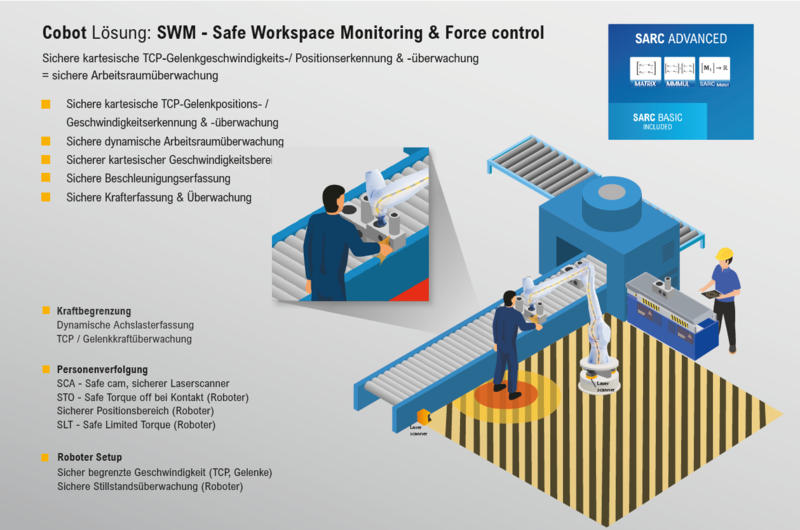
SARC bedeutet Safe Arithmetik Calculation und umfasst eine weitreichende Bibliothek zur sicheren Berechnung im Float-Datenformat. Diese reichen von einfachen Operationen, wie Addition oder Multiplikation/Division, über trigonometrische und Wurzel-Funktionen, bis hin zu Matrizenberechnungen. Somit können eine Breite von sicherheitstechnischen Aufgabenstellungen, wie die kontinuierliche Überwachung einer Wickelgeschwindigkeit in Abhängigkeit des Wickeldurchmessers, Scannerfeld-Umschaltung bei AGV’s bezogen auf deren Kinematik und Stellung der Lenkachsen bis hin zu komplizierteren Berechnungen, wie sichere TCP-/Joint- Positions- und Geschwindigkeitsbestimmung eines Roboters in einem kartesischen Koordinatensystem umgesetzt werden. Für letztere wurden speziell auch Matrix-Berechnungen zur einfachen Umsetzung von DH-Transformationen sowie zusätzliche räumliche Überwachungsfunktion in den Funktionsumfang aufgenommen. Die SARC-Funktionen umfassen neben den Rechenfunktionen Konvertierungsbausteine zur Umrechnung von Position und Geschwindigkeit aus Integer- in Float-Format sowie auch umgekehrt. Die Ergebnisdaten stehen damit als Position und Geschwindigkeit virtueller Achsen für die Anwendung auf die im Basisumfang der SCU Baureihe integrierte Funktionen zur sicheren Antriebsüberwachung zur Verfügung. Hierzu werden Eingangswerte (sichere Position / Geschwindigkeit, konfigurierbare Konstanten etc.) in einen "single precision float"-Wert umgewandelt und normiert, um diese weiter für die SARC verwenden zu können.
Für die weitere Berechnung steht eine Vielzahl von mathematischen Funktionen, in Form von Bausteinen, zur Verfügung, die individuell miteinander verknüpft werden können. Aus diesen Verknüpfungen entsteht letztendlich eine Anweisungsliste der kinematischen Berechnung, die auf die Sicherheitssteuerung geladen und ausgeführt wird.
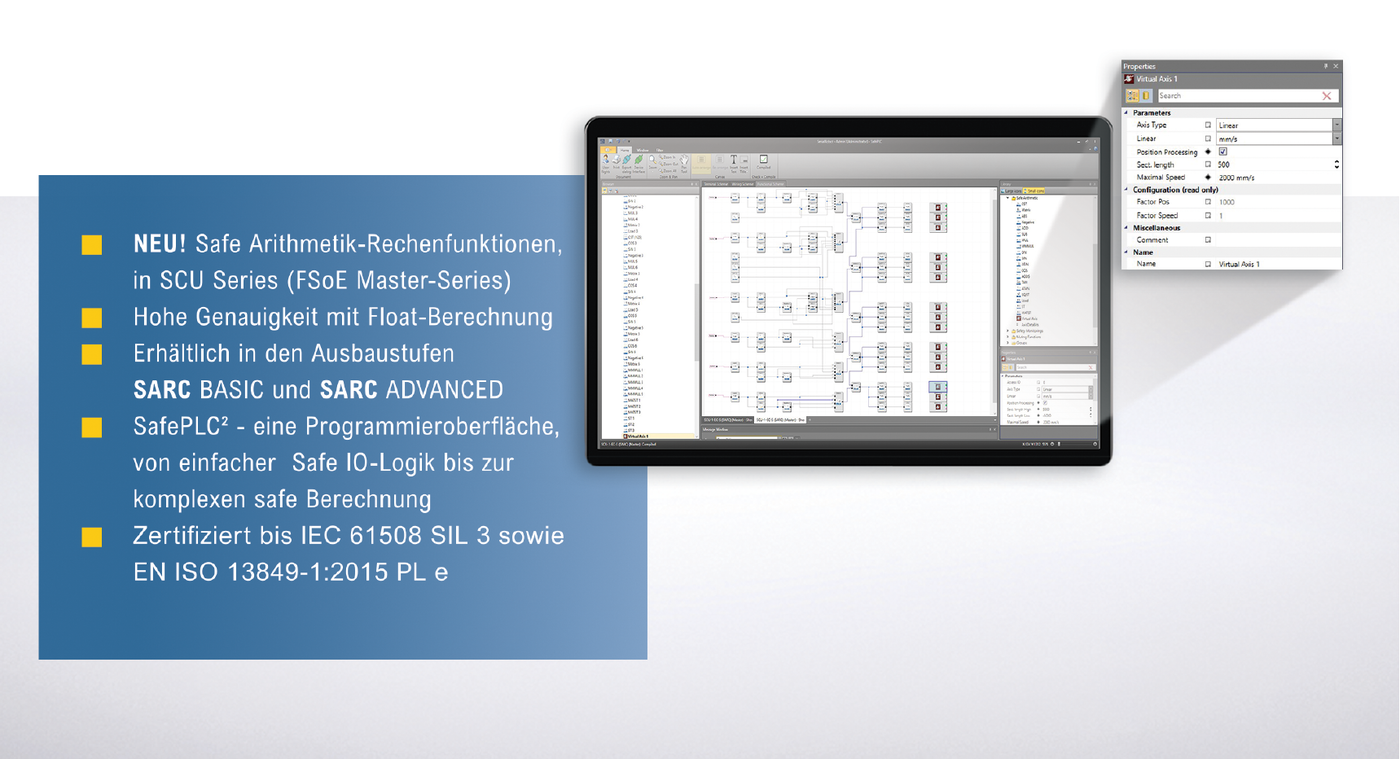
Die Programmierung der Berechnung erfolgt im FUP-Format des BBH Engineering-Tools SafePLC². Dieses Tool ermöglicht u.a. auch die Zusammenfassung einer programmierten Logik oder eben auch SARC-Berechnung zu Objekten mit definierter Schnittstelle für Eingangs- und Ausgangsdaten. Ein derartig erstelltes Applikations-Objekt kann zum einen instanziiert und zum anderen auch über eine Library-Funktion weiteren Applikationen zur Verfügung gestellt und somit eine eigene Wissensbasis generiert werden.
Die SARC-Berechnung ist zertifiziert zur Anwendung in sicherheitstechnischen Aufgabenstellungen bis SIL3/EN61508 bzw. Pl e/EN13849-1.
Die SARC-Funktionsbibliothek ist integriert in die BBH SCU/FSoE-Master-Baureihe und wird über einen zusätzlichen kostenpflichtigen Lizenzschlüssel freigeschaltet.
Beispiele für Anwendungsbereiche
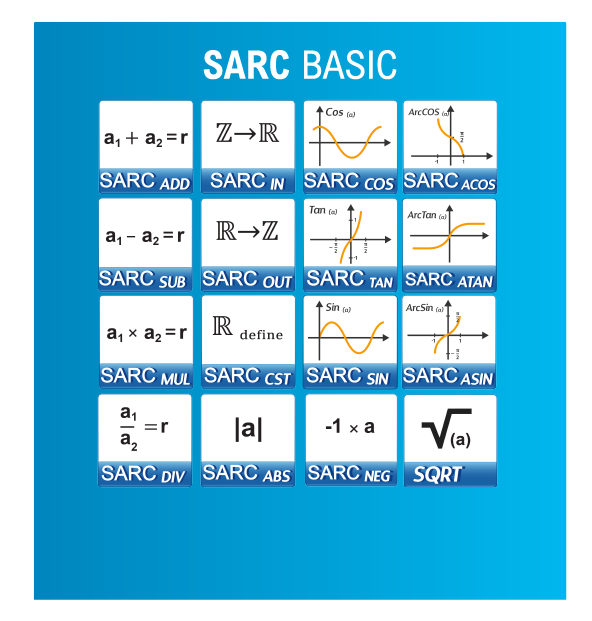
Auflistung der SARC-Rechenfunktionen
Die SARC-Funktionalität bietet die Möglichkeit, sichere kinematische Berechnungen mit vorgegebenen Eingangswerten durchzuführen. Bei den Eingabewerten kann es sich um Encoder-Messwerte, wie eine gemessene Position oder Geschwindigkeit, oder um definierte konstante Werte handeln. Für die kinematischen Berechnungen steht eine Vielzahl von möglichen Funktionsblöcken zur Verfügung. Derzeit können die folgenden Blöcke für Berechnungen verwendet werden:
| BEZEICHNUNG | FUNKTION | RECHENREGEL |
| SARC-CST | Definiert eine Konstante | wissenschaftlich = a.b*10c > single precision floating point = r |
| SARC-IN | Konvertierung von Eingangsdaten zu "single precision floating point" | a > single precision floating point = r D > single precision floating point = d a * d = r |
| SARC-OUT | Konvertierung des „single precision floating point“-Werts zu Ausgangsdaten | a * D > integer32 Länge gemäß Parameter prüfen L |
| SARC-ADD/SUB | Addition / Subtraktion von 2 .. 8 Eingangswerten | a1+a2= r a1-a2=r |
| SARC-MUL | Multiplikation von zwei Werten | a1*a2 = r |
| SARC-DIV | Division zweier Werte | a1/a2 = r |
| SARC-NEG | Multiplikation mit -1 | |
| SARC-SQRT | Quadratwurzel des Eingabewertes | SQRT(a) = r |
| SARC-ABS | Absoluter Wert des Eingabewertes | ABS(a) = r |
| SARC-SIN | SIN-Wert des Eingabewertes (rad) | SIN(a) = r |
| SARC-ASIN | ARC SIN-Wert des Eingabewertes (rad) | ARC SIN(a) = r |
| SARC-COS | COS-Wert des Eingabewertes (rad) | COS(a) = r |
| SARC-ACOS | ARC COS-Wert des Eingabewertes (rad) | ARC COS(a) = r |
| SARC-TAN | TAN-Wert des Eingangswertes (rad) | TAN(a) = r |
| SARC-ATAN | ARC TAN-Wert des Eingangswertes (rad) | ARC TAN(a) = r |
| SARC-MATRIX | ||
| SARC-MMMUL | Matrix-Matrix Multiplikation | |
| SARC- Matst | Matrizen-Store | |
| Virtuelle Achse | Speichern von Berechnungsergebnissen in "virtuellen" Achsen
Virtuelle Achsen können als Standard-Achsen verwendet werden
| |


KONTAKT
Möchten Sie mehr über uns oder eines unserer Produkte erfahren?
Dann scheuen Sie sich nicht, das Kontaktformular auszufüllen und mit uns in Verbindung zu treten.
Wir freuen uns auf Ihre Nachricht und werden versuchen, so schnell wie möglich auf Ihre Anfrage zu reagieren.